† joint first author
Abstract
Many visualization techniques exist for interactive exploration of segmentation volumes, however, photorealistic renderings are
usually computed using slow offline techniques. We present a novel compression technique for segmentation volumes which
enables interactive path tracing-based visualization for datasets up to hundreds of gigabytes: For every label, we create a grid
of fixed-size axis aligned bounding boxes (AABBs) which covers the occupied voxels. For each AABB we first construct a sparse
voxel octree (SVO) representing the contained voxels of the respective label, and then build a sparse voxel directed acyclic
graph (SVDAG) identifying identical sub-trees across all SVOs; the lowest tree levels are stored as an occupancy bit-field. As
a last step, we build a bounding volume hierarchy for the AABBs as a spatial indexing structure. Our representation solves a
compression rate limitation of related SVDAG works as labels only need to be stored along with each AABB and not in the
graph encoding of their shape. Our compression is GPU-friendly as hardware raytracing efficiently finds AABB intersections
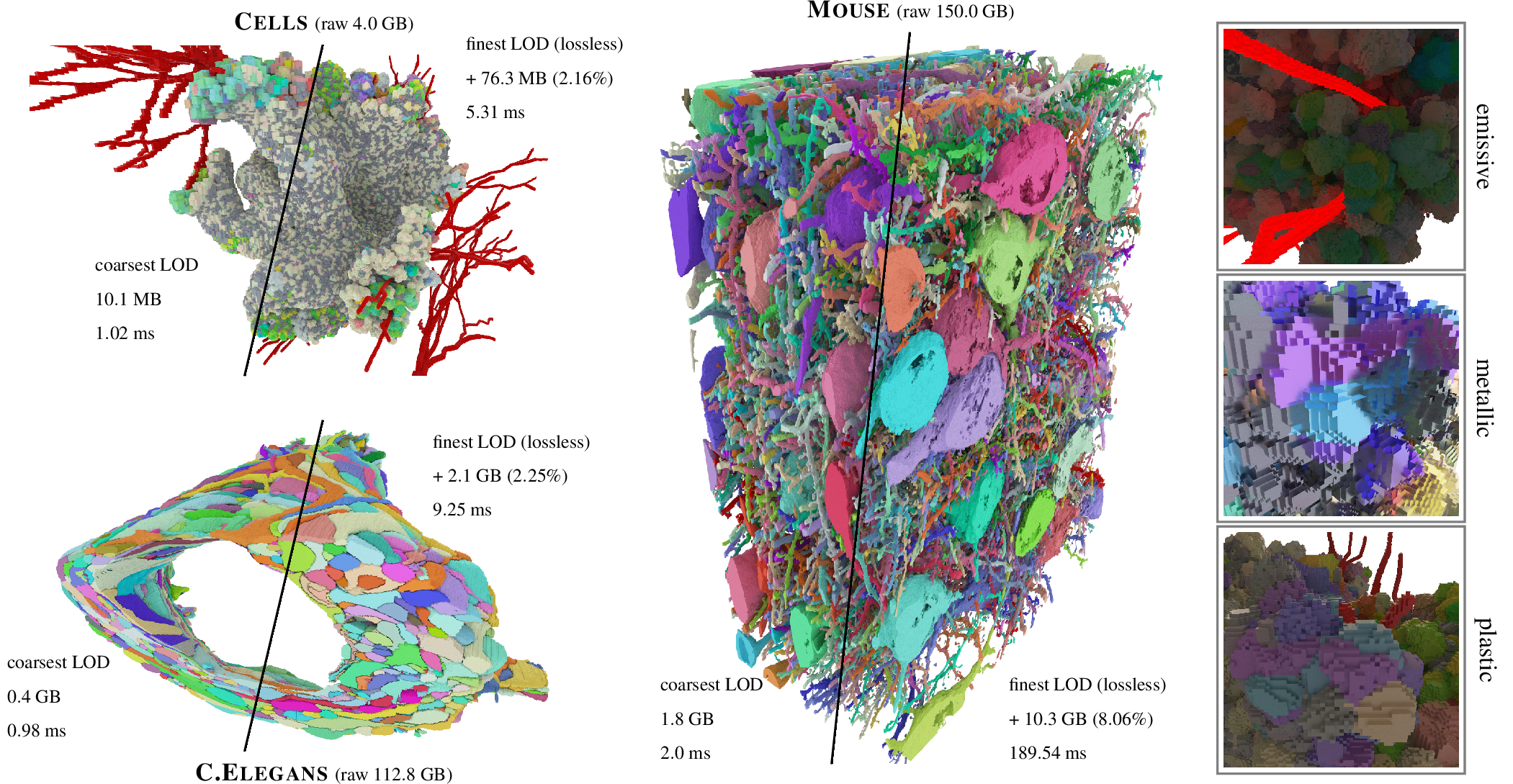
which we then traverse using a custom accelerated SVDAG traversal. Our method is able to path-trace a 113 GB volume on a
consumer-grade GPU with 1 sample per pixel with up to 32 bounces at 108 FPS in a lossless representation, or at up to 1017
FPS when using dynamic level of detail.
This work is licensed under a Creative Commons Attribution 4.0 International License (CC BY 4.0).
Downloads
Bibtex
@inproceedings{Werner:2024:SegmentationSVDAG,
booktitle = {Vision, Modeling, and Visualization},
editor = {Linsen, Lars and Thies, Justus},
title = {{SVDAG Compression for Segmentation Volume Path Tracing}},
author = {Werner, Mirco and Piochowiak, Max and Dachsbacher, Carsten},
year = {2024},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-247-9},
DOI = {10.2312/vmv.20241196}
}