ACM Transactions on Graphics 37(6) (Proceedings of SIGGRAPH Asia 2018)
A dining room lit from the outside by an area light and by a spot light on the
table.
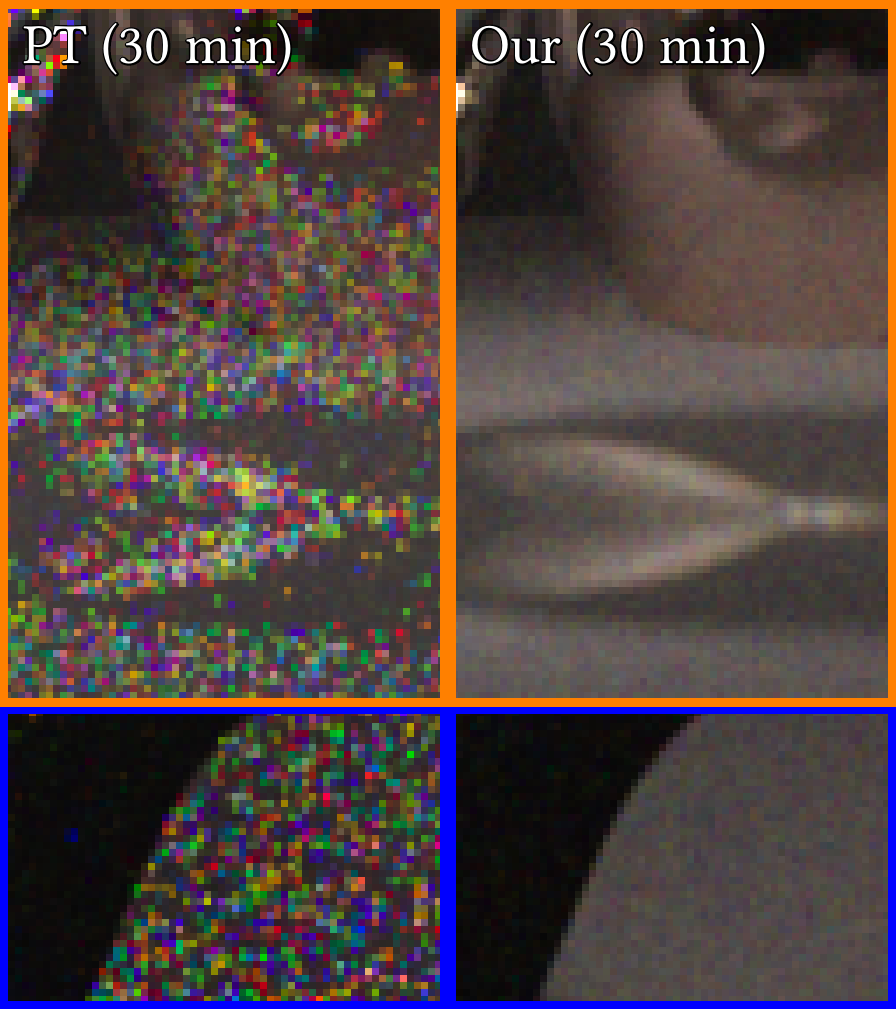
The insets show that our (unidirectional) guided sampling is able to resolve
the caustic much better than path tracing (PT) in the same time. Guided
sampling learns the difficult parts of the light transport in 3 minutes
(guided contribution, bottom right image) and rendered for 27 minutes.
Our approach is selective, i.e. the guided sampler automatically focuses only
on the parts of the illumination which are poorly sampled by the unguided
estimator. The images on the right show the unguided and guided component of
our method.
Abstract
Finding good global importance sampling strategies for Monte Carlo light
transport is challenging. While estimators using local methods (such as BSDF sampling or next
event estimation) often work well in the majority of a scene, small regions in path space
can be sampled insufficiently (e.g. a reflected caustic).
We propose a novel data-driven guided sampling method which selectively
adapts to such problematic regions and complements the unguided estimator.
It is based on complete transport paths,
i.e. is able to resolve the correlation due to BSDFs and free flight distances
in participating media. It is conceptuall simple and places anisotropic
truncated Gaussian distributions around guide paths to reconstruct a continuous
probability density function (guided PDF).
Guide paths are iteratively sampled from the guided as well as the unguided PDF
and only recorded if they cause high variance in the current estimator.
While plain Monte Carlo samples paths independently and Markov chain-based methods
perturb a single current sample, we determine the reconstruction kernels
by a set of neighbouring paths. This enables local exploration of the
integrand without detailed balance constraints or the need for analytic derivatives.
We show that our method can decompose the path space into a region that is well
sampled by the unguided estimator and one that is handled by the new guided
sampler. In realistic scenarios, we show 4x speedups over the unguided sampler.
Downloads
Bibtex
@article{2018_guided,
title = {Selective guided sampling with complete light transport paths},
author = {Florian Simon and Alisa Jung and Johannes Hanika and Carsten Dachsbacher},
journal = {Transactions on Graphics (Proceedings of SIGGRAPH Asia)},
volume = 37,
number = 6,
year = 2018,
month = dec,
doi = {10.1145/3272127.3275030}
}