
Mechanik
|
The Institute of Operating- and Dialogsystems has focused its work during the past few years on researching and developing methods for mechanical simulations VR-systems and in robotics. The team of co-workers has worked on projects for developing VR systems and algorithms for dynamical simulations, taking into consideration collisions and friction, with the aim to develop accurate, realistic, and easy to implement methods and tools for simulation. |
|||
|
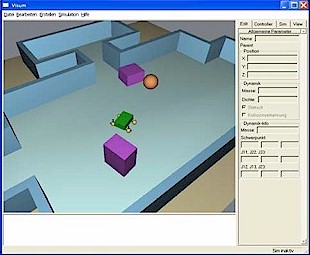
One of the main projects of the institute is focused on developing an architecture of the institute’s open VR system Visum, which offers close to reality testing of mechatronic systems. In addition to the standard functionality of VR systems, like navigation in 3D space, in order to provide a realistic mechanical behavior the system has to simulate kinematical and dynamical effects, it has to resolve collisions and the embodied effects of friction and impulse transfer. Visum has been successfully tested in several experiments and compared to existing mechatronic systems, e.g. a real robot arm with its controlling software. |
|||
|
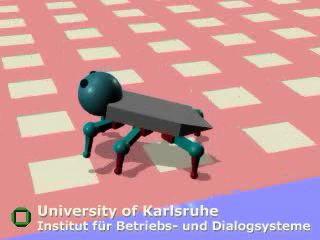
We also present a new impulse-based algorithm for the dynamics simulation of linked rigid body systems. The main concept of this method is that forces are systematically substituted by impulses, by introducing a new iterative procedure to calculate impulses which conserve joint constraints. In this way the simulation is successfully performed in a very direct way and without solving complex systems of differential equations. |
|||
Projects of the Institute
|
|||
 We also present a new impulse-based algorithm for the dynamics simulation of linked rigid body systems. The main concept of this method is that forces are systematically substituted by impulses, by introducing a new iterative procedure to calculate impulses which conserve joint constraints. In this way the simulation is successfully performed in a very direct way and without solving complex systems of differential equations.
We also present a new impulse-based algorithm for the dynamics simulation of linked rigid body systems. The main concept of this method is that forces are systematically substituted by impulses, by introducing a new iterative procedure to calculate impulses which conserve joint constraints. In this way the simulation is successfully performed in a very direct way and without solving complex systems of differential equations.