
Articulated bodies
Adrian Hoppe
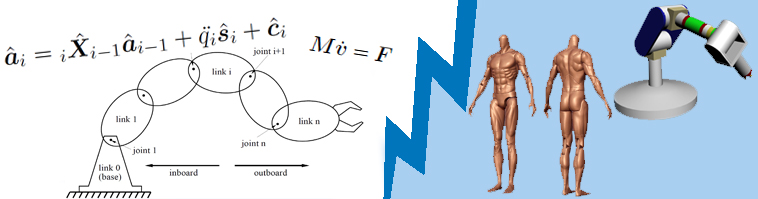
Articulated Bodies beschreiben eine Menge von rigiden Körpern, welche über Gelenke miteinander verbunden sind. Beispiele für einen Articulated Body sind ein Roboter-Arm oder ein menschliches Skelett. Die Analyse der Dynamik eines solchen Systems ist ein komplexes Problem. Auf die Körper wirken nämlich zusätzliche Kräfte, welche über die Gelenkverbindungen übertragen werden. Der Wunsch nach Interaktivität und physikalischer Korrektheit stellt hohe Anforderungen an eine Problemlösung. Dieser Vortrag soll einen Überblick zur Simulation von Artiulated Bodies geben. Es werden mehrere Algorithmen vorgestellt, die sowohl performant, als auch hinreichend exakt arbeiten.
Inhalt:
- Definition Articulated Bodies
- Probleme
- Inverse Dynamic Problem
- Forward Dynamic Problem
- Lösungsansätze für das Forward Dynamic Problem
- Maximal Coordinate Methods
- Beispiel Lagrange Multiplier Methode von Baraff
- Reduced Coordinate Methods
- Beispiel Articulated Bodies Algorithmus von Featherstone + Erweiterungen
- Kollisionserkennung und -reaktion für Articulated Bodies
- Maximal Coordinate Methods
Literatur:
- http://www-scf.usc.edu/~csci520/slides/ArticuBody.pdf
- Roy Featherstone und David Orin: Robot dynamics: equations and algorithms. In: ICRA, Seiten 826–834, 2000.
- E Otten: Inverse and forward dynamics: models of multi–body systems. Philosophical Transactions of the Royal Society B: Biological Sciences, 358(1437):1493–1500, 2003.
Bildquellen:
- https://upload.wikimedia.org/wikipedia/commons/9/9b/Robot_arm_model_1.png
- http://www.cgsociety.org/cgsarchive/newgallerycrits/g78/389578/389578_1270757727_large.jpg
- Brian Vincent Mirtich: Impulse-based dynamic simulation of rigid body systems. Dissertation, University of California at Berkeley, 1996.
{kind=link}
{kind=link}